
SCARA机器人
SCARA平面关节式机器人是目前使用较为广泛的通用型机器人。在动作相对简单,而又需要有高产量的环境中,SCARA机器人相比六轴机器人而言很有优势的。SCARA机器人在点对点的运动中是最好的机器人,常用于分配、搬运、装载、包装、安放以及装配等作业之中。
机器人本体机械设计
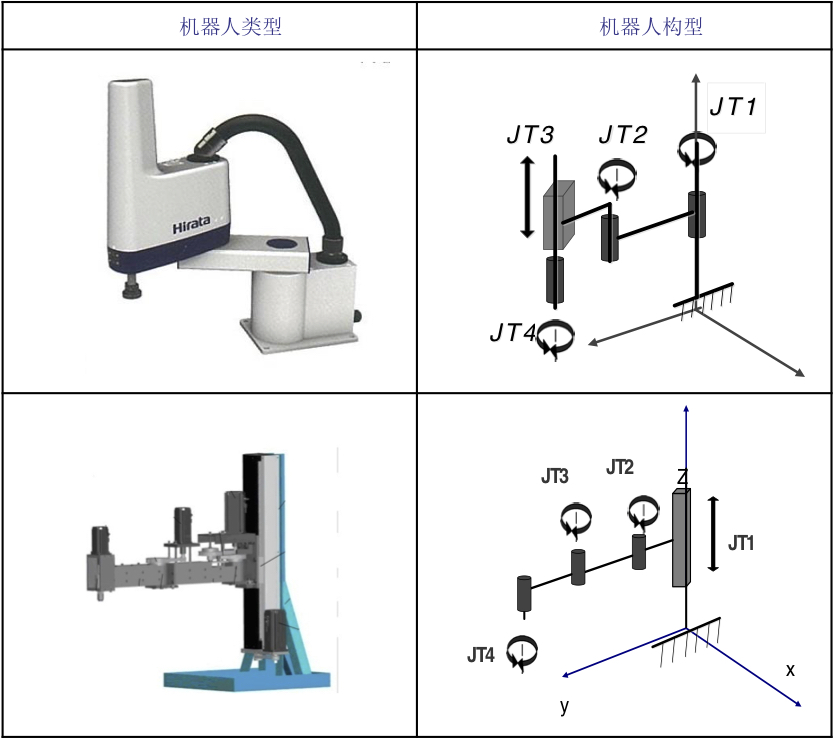
机器人构型
两种比较具有代表性的SCARA机器人的构型,初步选择了两种方案,如下图所示:
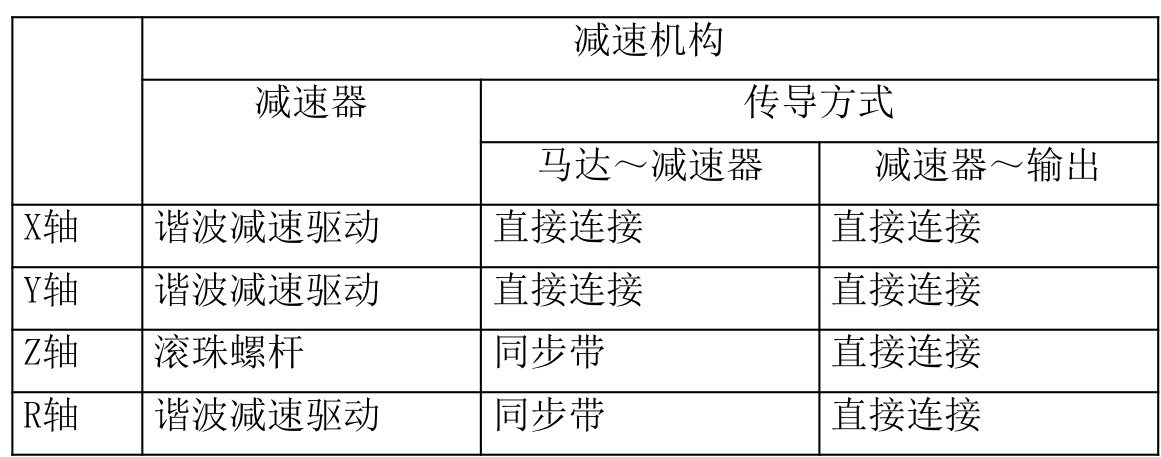
机器人传动方式
该四自由度关节型工业机器人各个轴的传动方案确定如下:
- X轴回转:底座→伺服电机→谐波减速器→大臂回转
- Y轴回转:大臂→伺服电机→谐波减速器→小臂回转
- Z轴移动:小臂→伺服电机→同步带→丝杆螺母副→滚珠花键副上下平动
- R轴回转:小臂→伺服电机→同步带→谐波减速器→滚珠花键轴套→滚珠花键副
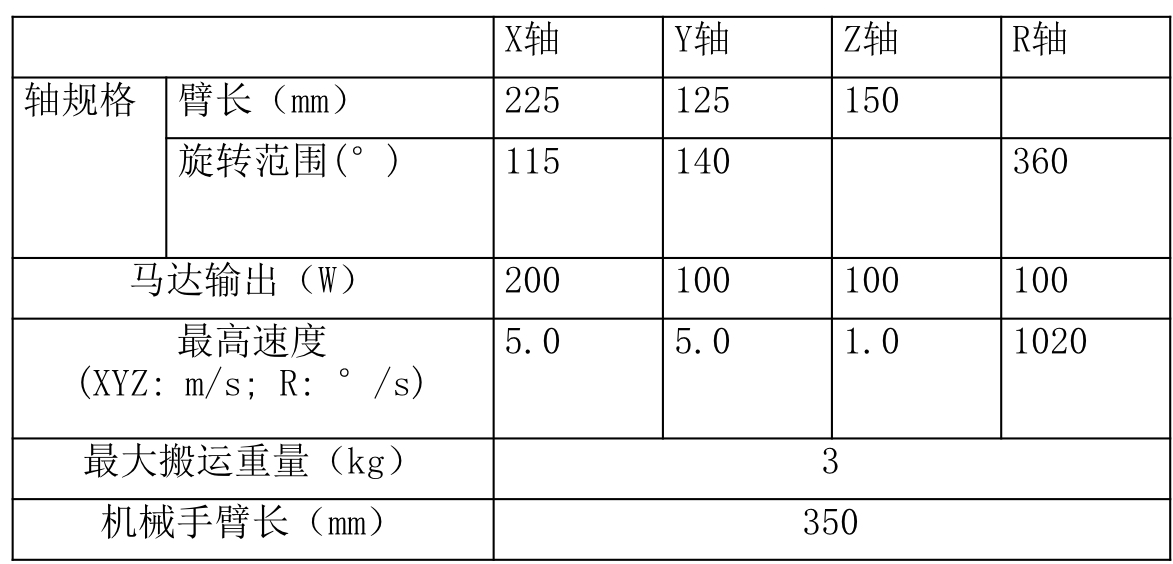
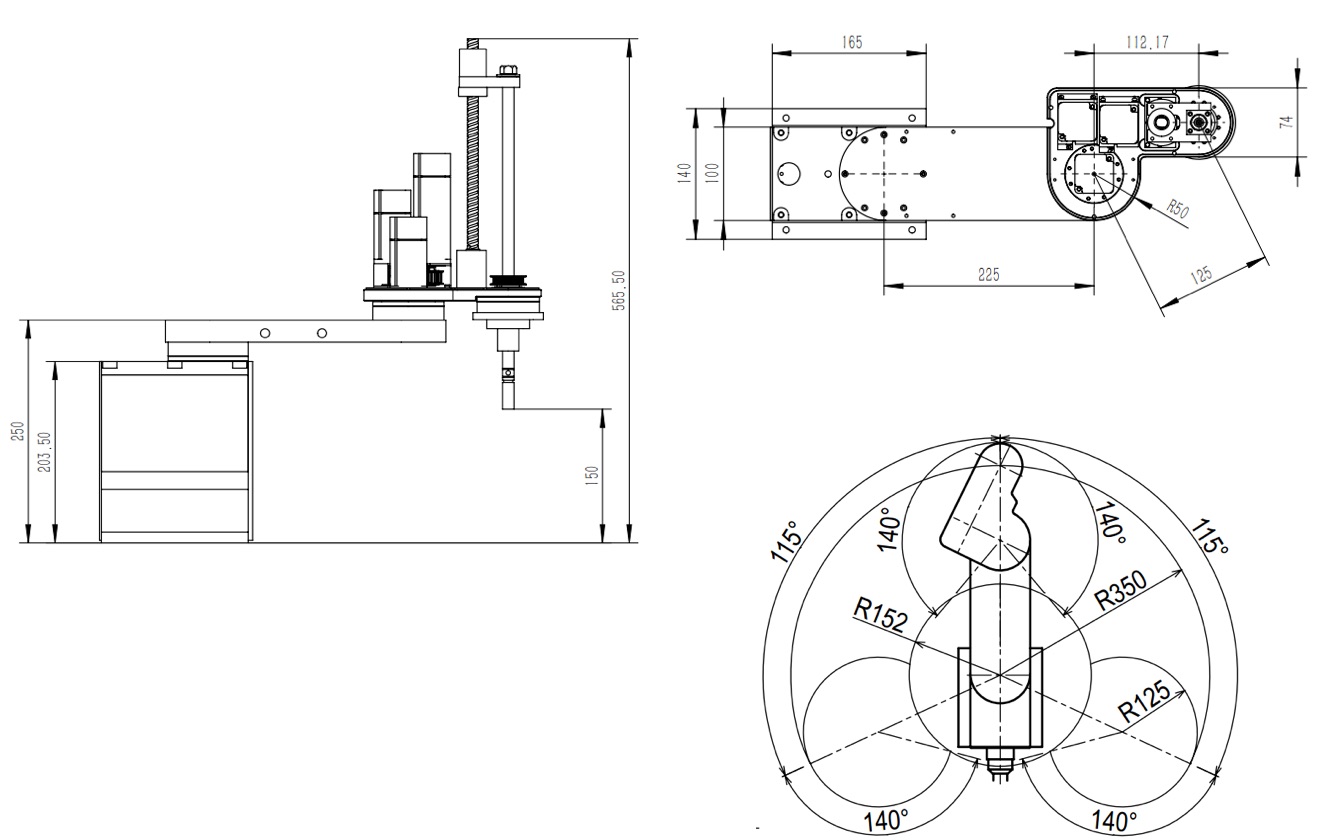
机器人尺寸及工作空间
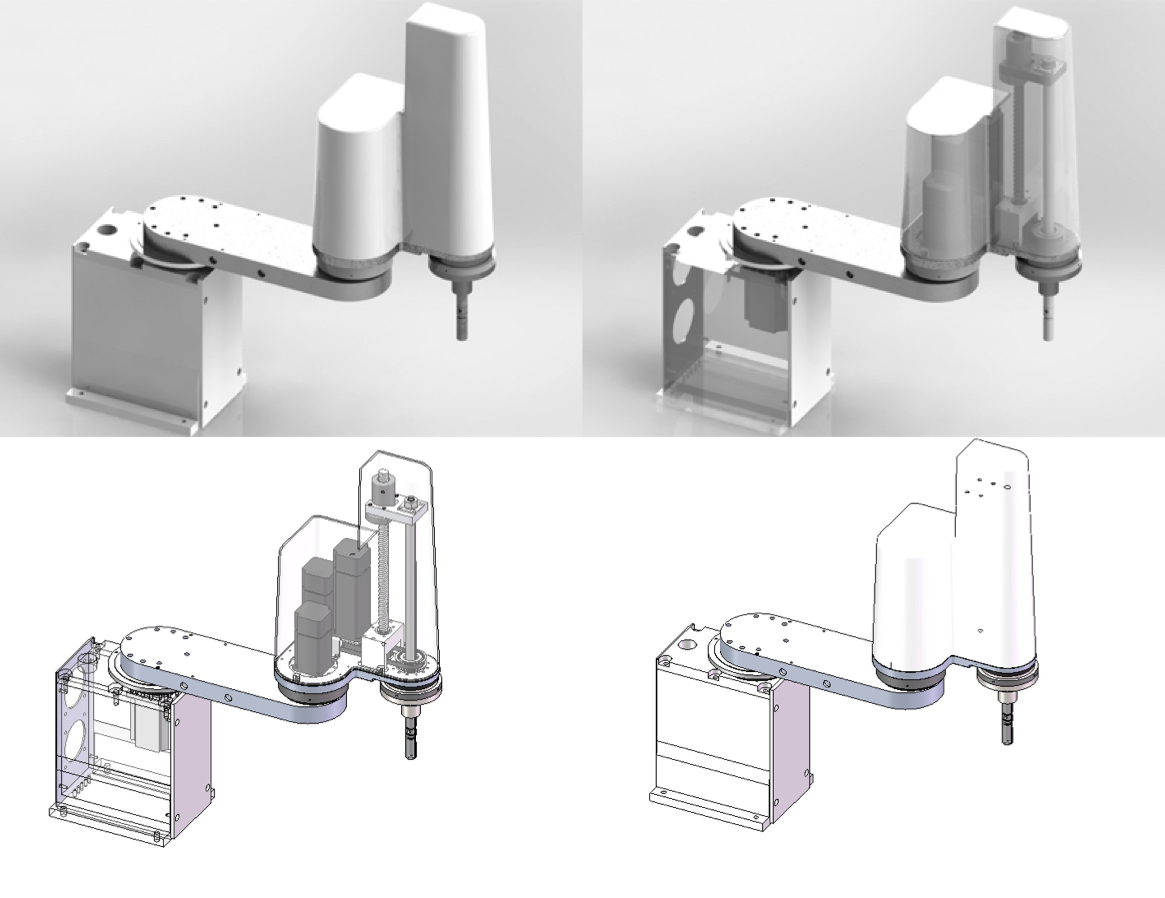
机器人的整体设计结构如下图所示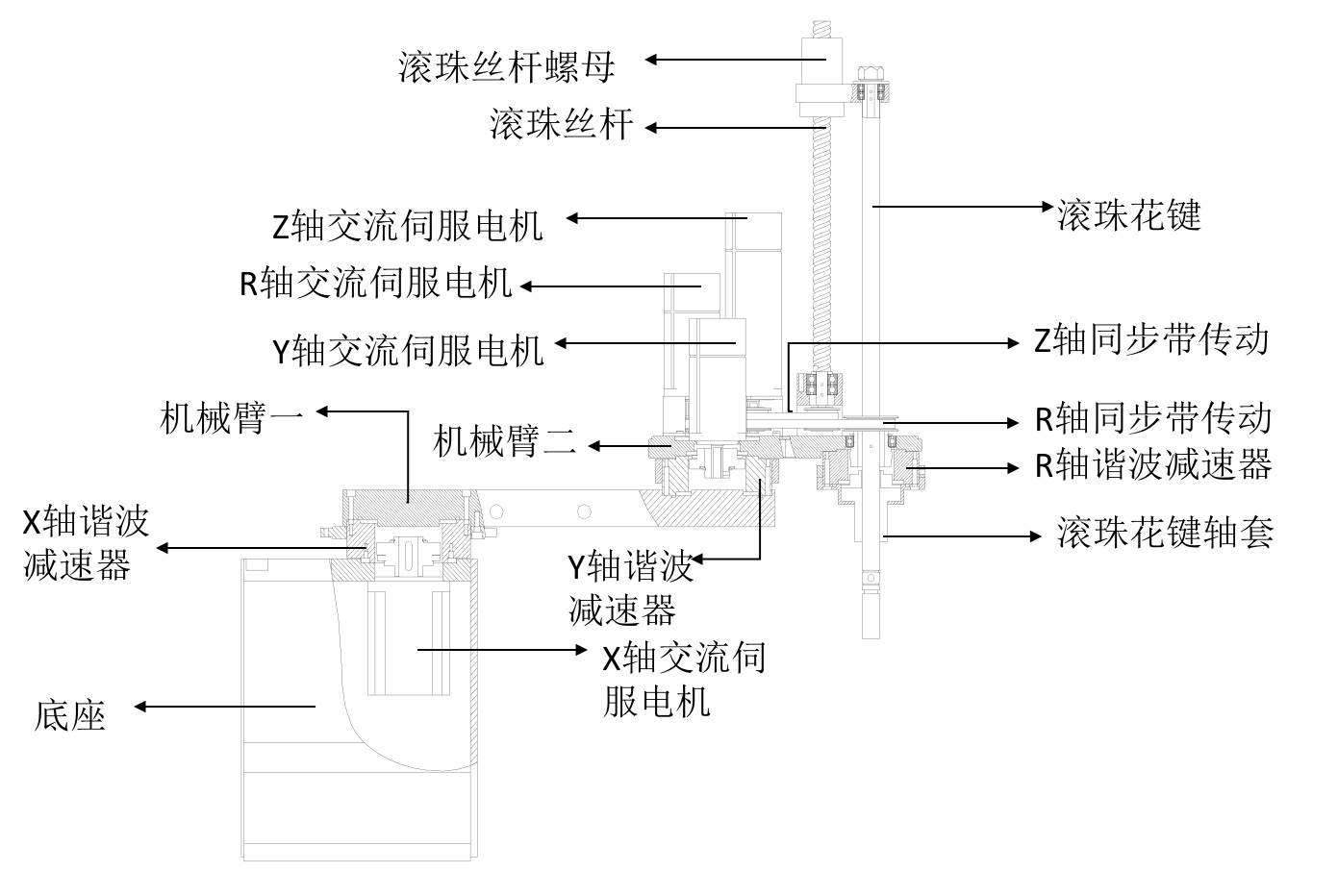
机器人的整体尺寸以及工作空间如下图所示
机器人整体渲染效果图
机器人关键结构设计
机械臂一结构设计
电机固定在底座上,有利于减少机械臂的惯量。所选的谐波减速器为日本哈默纳科简易型谐波减速器SHG/SHF类型,该类型谐波属于简易型谐波减速器,内部置有用于支撑外部负载的精密、具有高刚性的交叉滚子轴承,不用再在外部安装用于支承负载的轴承,所以只需将刚轮、柔轮分别与底座和机械臂一固定,就能实现X轴的转动。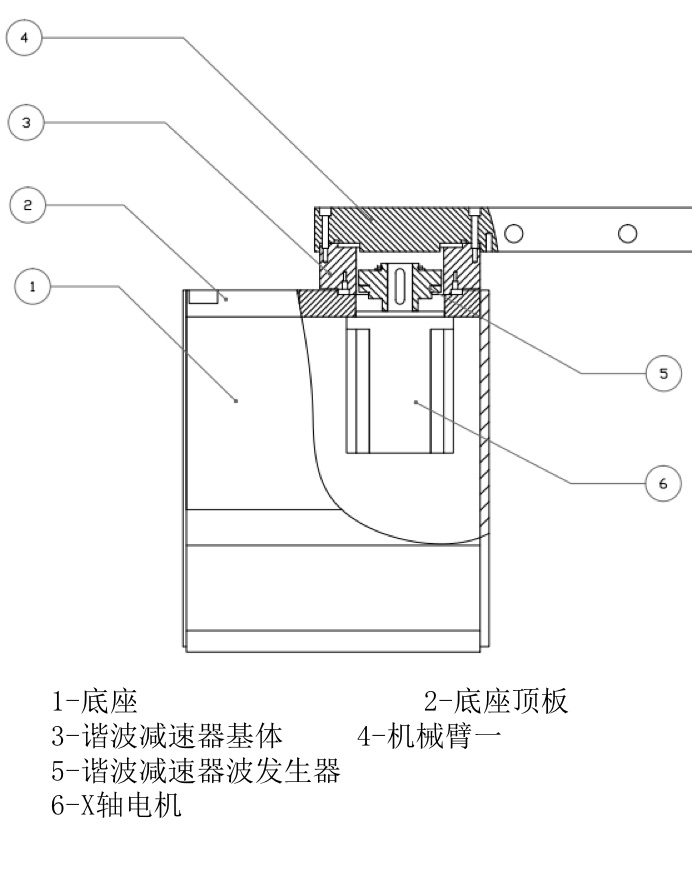
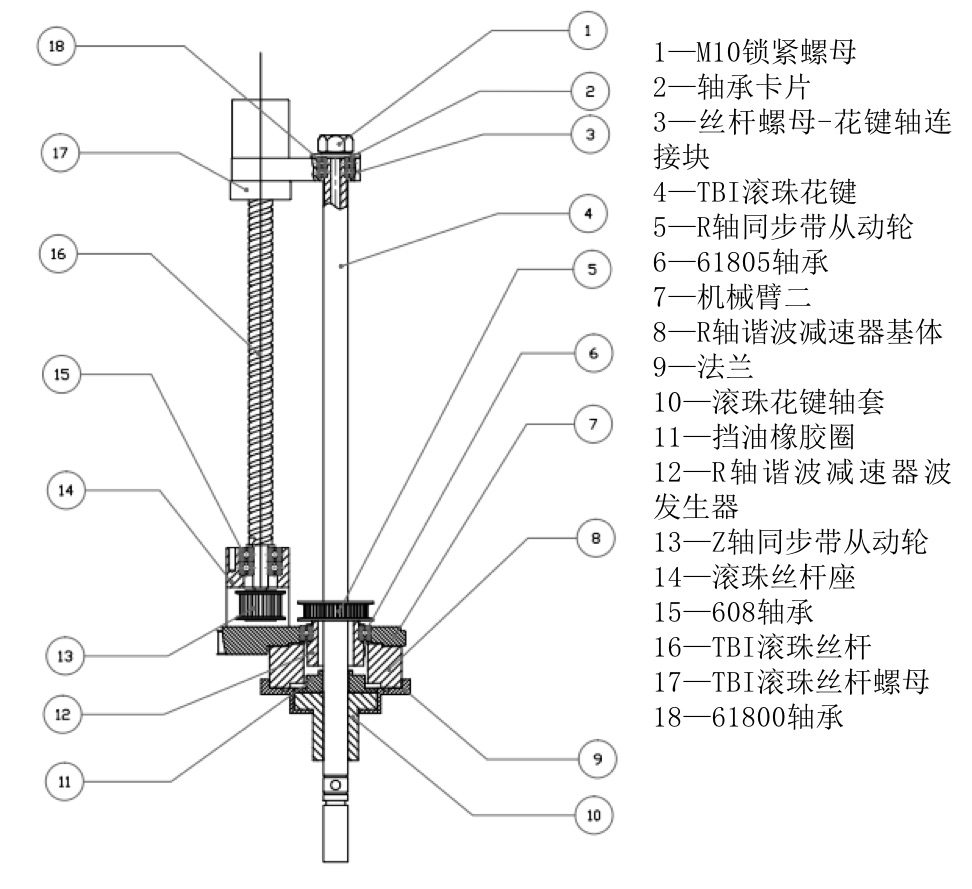
机械臂手腕结构设计
由于主轴位于机器人小臂的末端,对重量和惯量比较敏感,所以要求整个结构紧凑、重量轻,同时考虑到控制系统设计的相对简单和成本的相对低廉,采用滚珠花键和滚珠螺杆组合的方式。目前SCARA机器人最新的结构是采用滚珠花键-丝杆一体的结构,但这样的结构需要两个电机耦合控制来实现末端的旋转和上下移动,使控制系统较为复杂。
机器人运动学分析
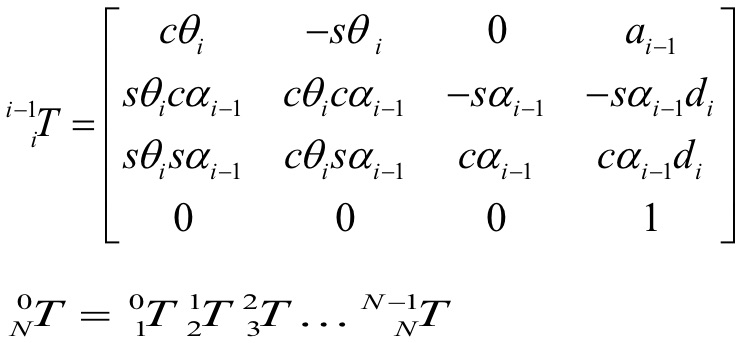
工业机器人运动学方程
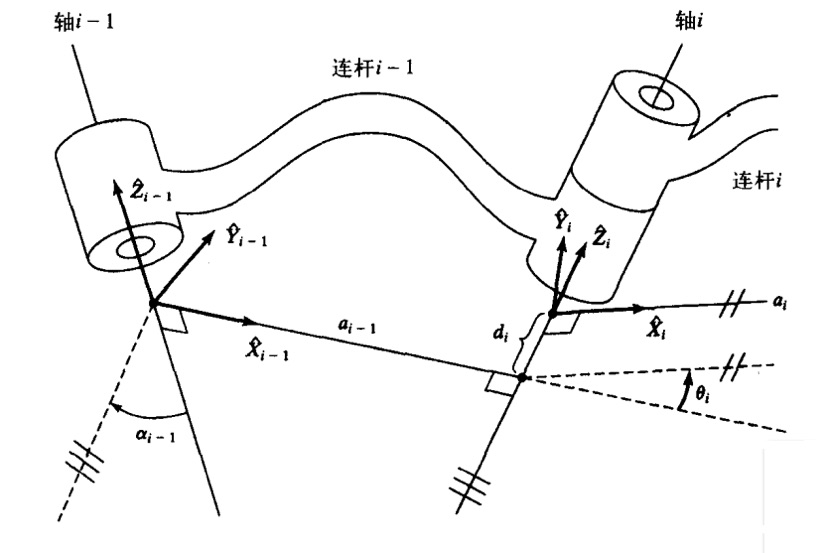
该SCARAb机器人D-H模型
根据所设计的SCARA机器人结构,机器人D-H坐标系如下图所示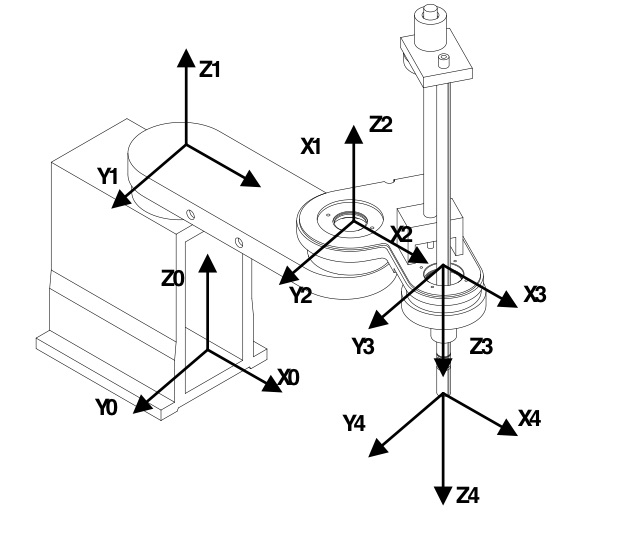
其连杆参数表如下图所示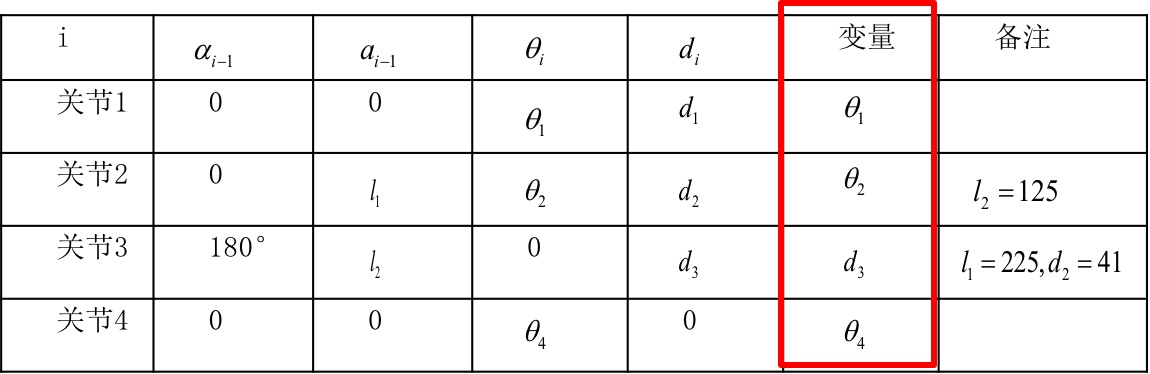
正运动学分析
各连杆变换矩阵连乘,便能得到机器人末端连杆的位姿方程,也就是正运动学方程。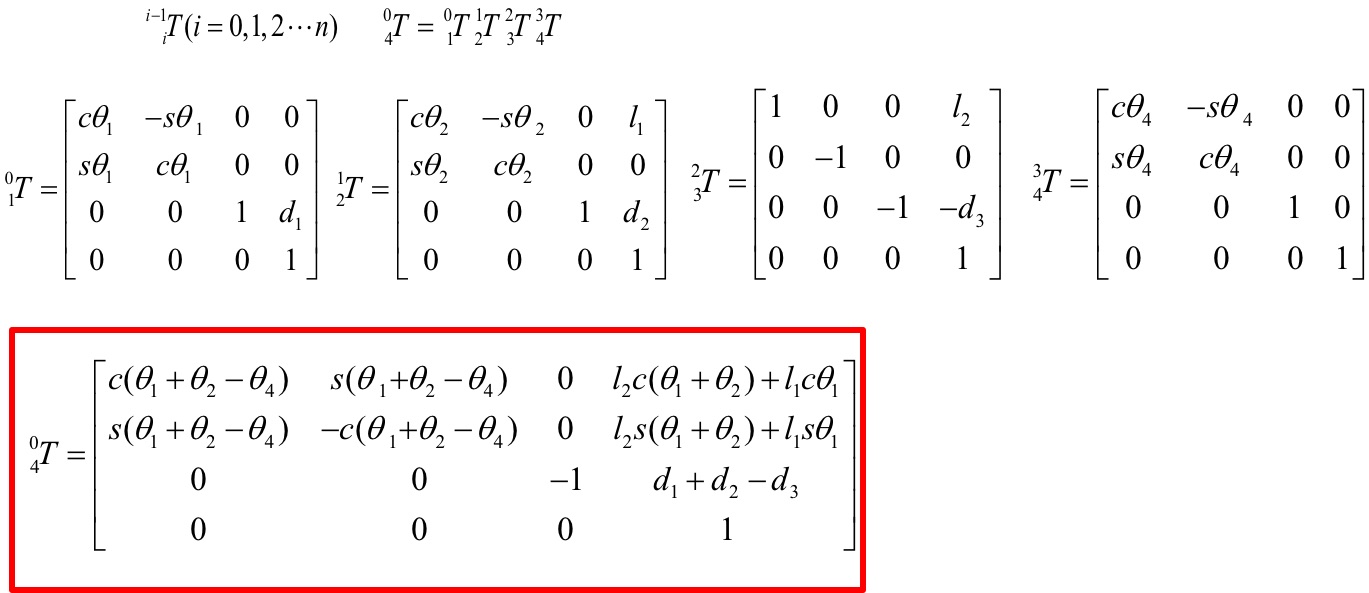
逆运动学分析
在四自由度关节型机器人基坐标系中,机械手末端执行器的位姿矢量设为已知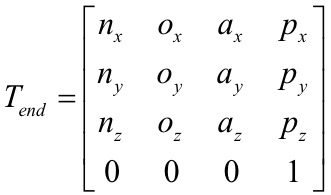
也就是
最终可求得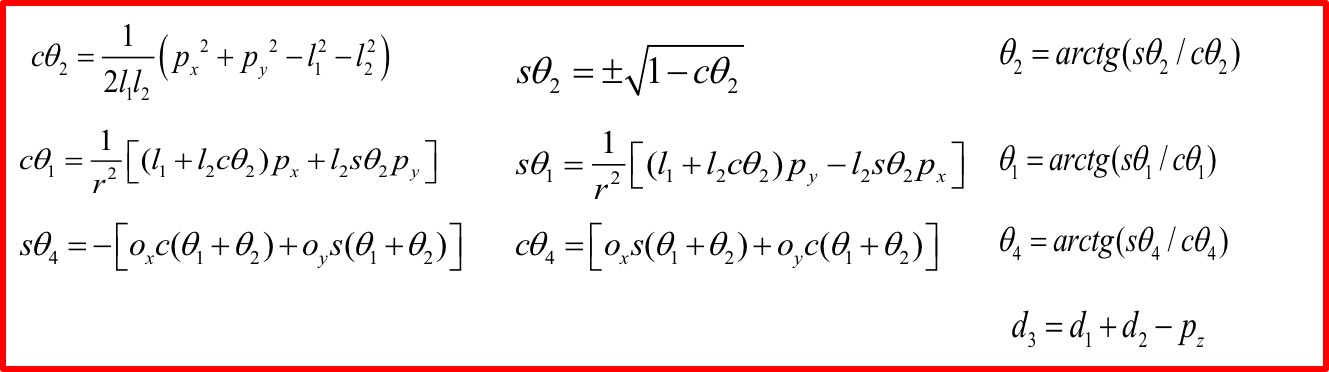
π
于2013年
导师:王念峰
华南理工大大学
源文件下载链接
solidworks模型及工程图,key:0ps4